
A 2RP precision positioning unit mounted to its calibration test rig. I implemented an analytical inverse kinematics solution to determine the appropriate joint angles given a a world coordinate. I also built a test rig for calibration (as shown) - currently the goal is to obtain sub millimeter precision.

I designed and fabricated a stand to integrate Baxter's torso to the AMP-I mobile base. The stand features shelves for housing Baxter's three computers.
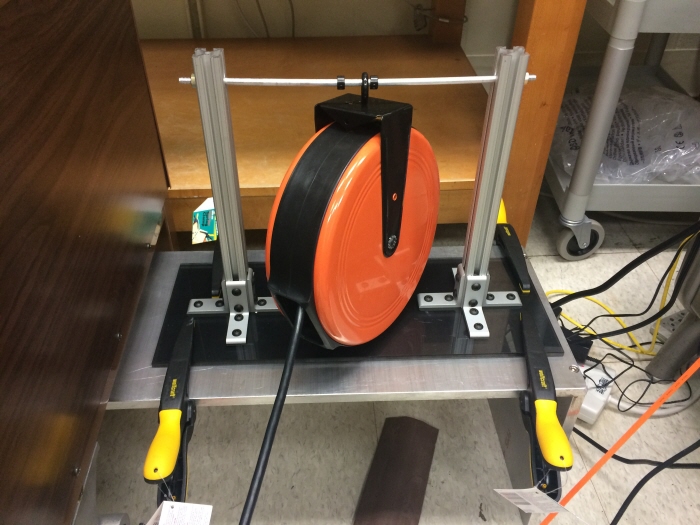
During driving, the Ebolabot can become entangled with its own cables due to slack in its power cords. I designed and fabricated a retractable cable reel assembly for reducing slack.

The whole system.
gLike
IML: Telerobotic Intelligent Nursing Assistant (TRINA)
My contributions to TRINA, or more colloquially known as Ebolabot, as an undergraduate research assistant for the Intelligent Motion Laboratory.