
This is the game board. My strategy was to collect flags which are held in place by strong magnets, and to deposit them in the acrylic house at the bottom of the mountain.
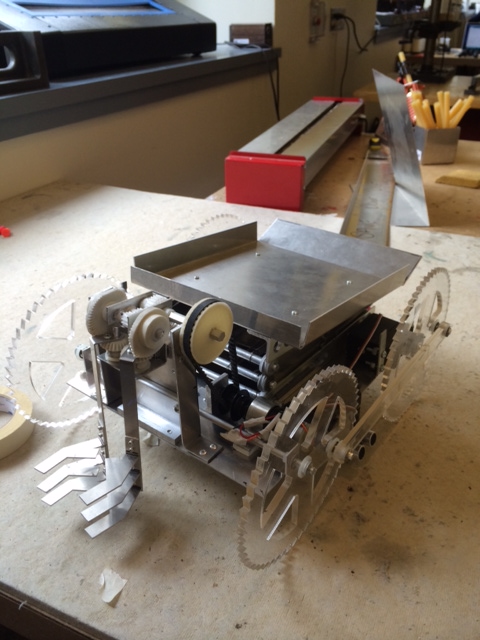
My almost completed robot.
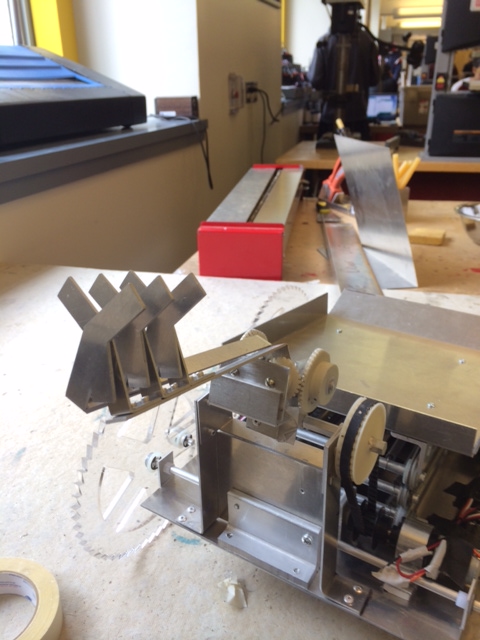
Robot in its grabbing phase
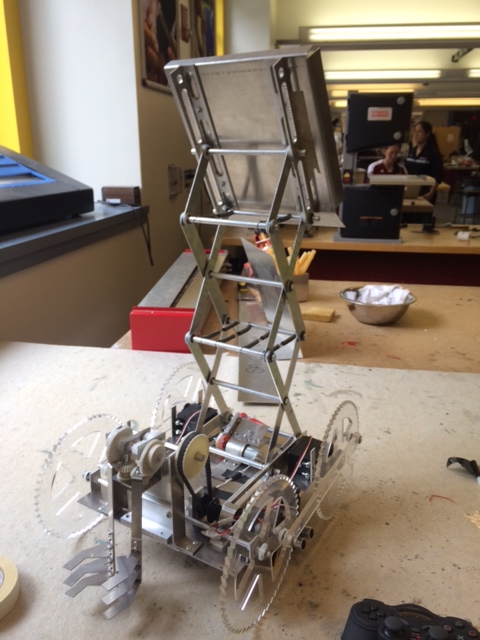
Robot with scissor lift extended. I used one actuator and several extension springs to raise it.
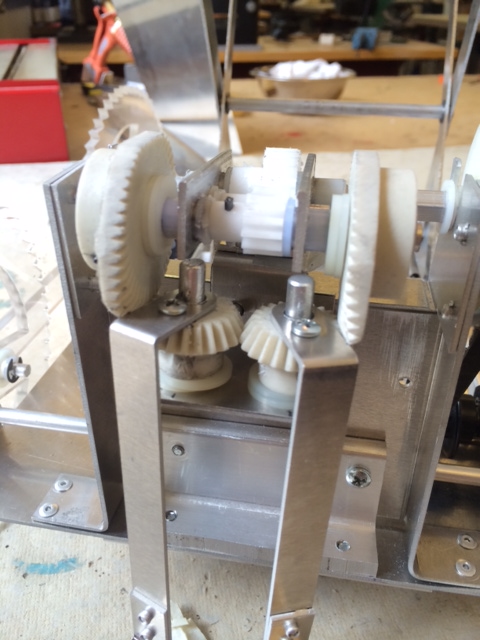
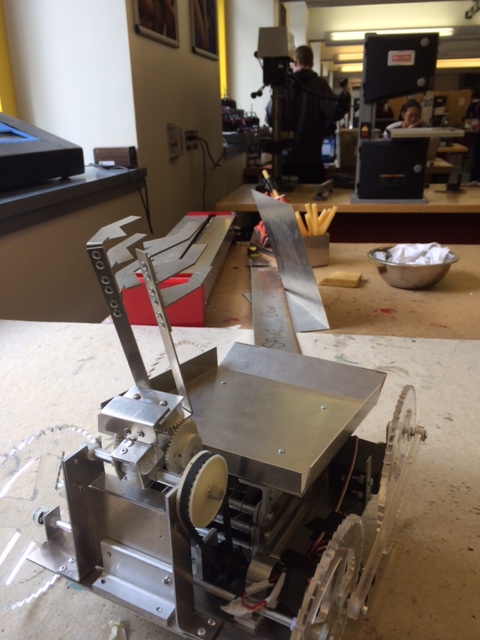
Up close look at Claw gear train.
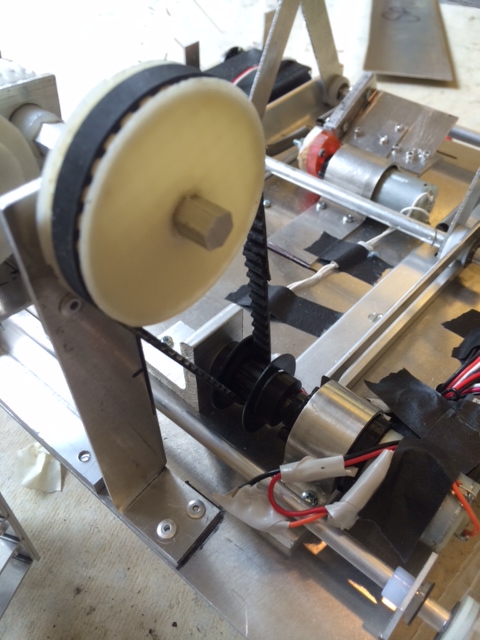
Belt and Timing Pulley mechanism used to actuate the claw. Larger timing belt was 3d printed to increase torque.
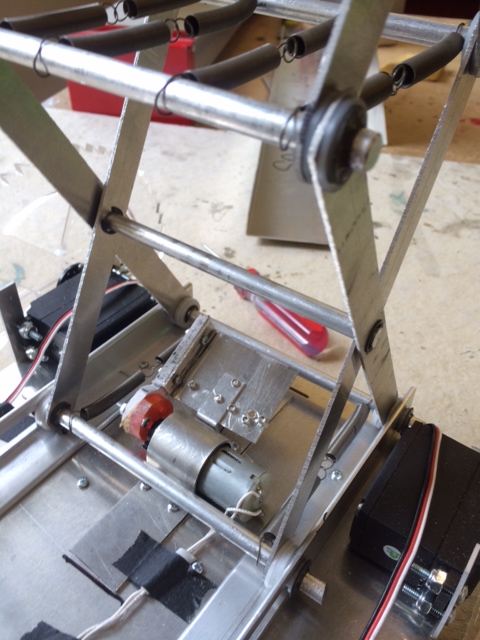
Up close look at the actuation mechanism of the scissor lift.
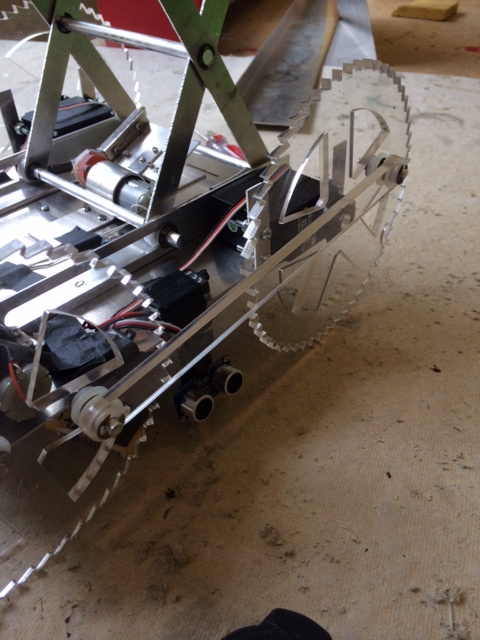
Spikey wheels were used to increase the coefficient of friction, and a coupling rod was used for 4 wheel drive. The front wheel was also reversed in direction so that the robot had better traction going down the slope. I ended up replacing the front wheels with one caster wheel, because the large wheels made it difficult to turn on the narrow slopes of the mountain.
I added a locking mechanism to the scissor lift actuator so that the spring loaded scissor lift would not extend while my robot was climbing the hills.

Up close view of claw. It uses a gear train to both grab the flag and pull the flag out using one actuator.
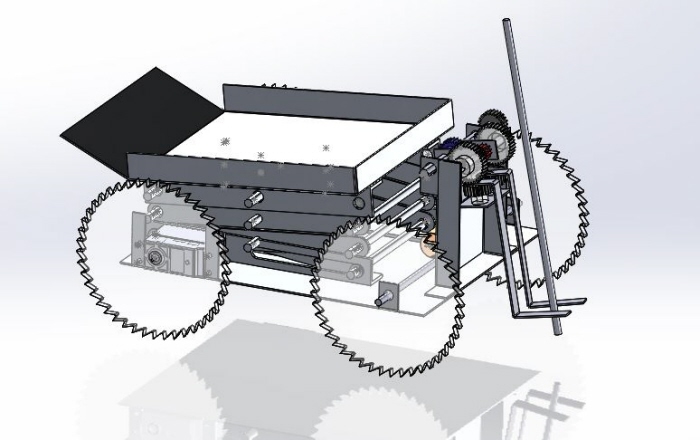
Isometric view of almost completed robot in SolidWorks
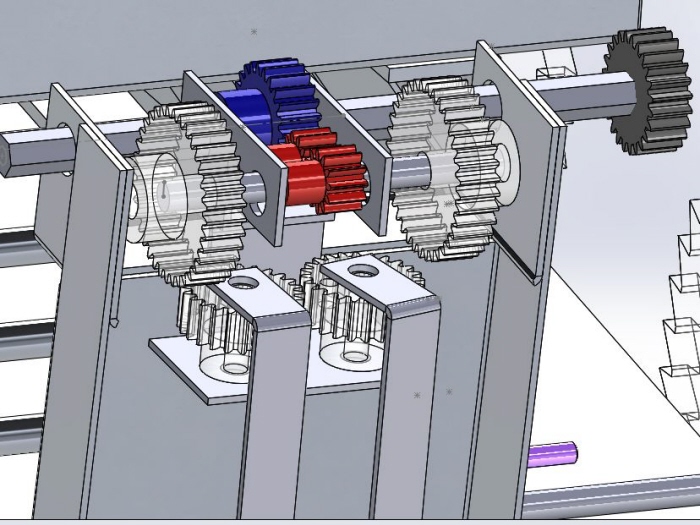
Claw mechanism in SolidWorks

Scissor lift in SolidWorks
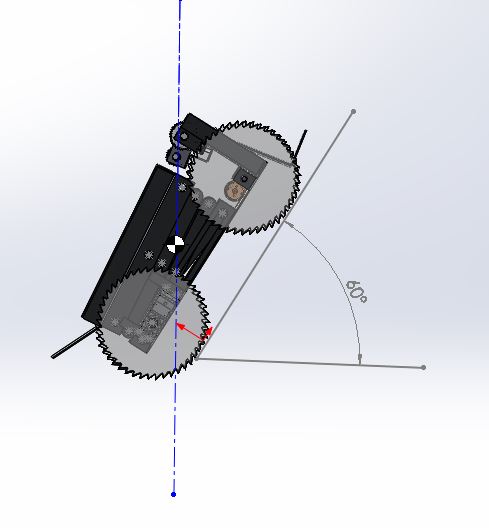
COM calculation in SolidWorks
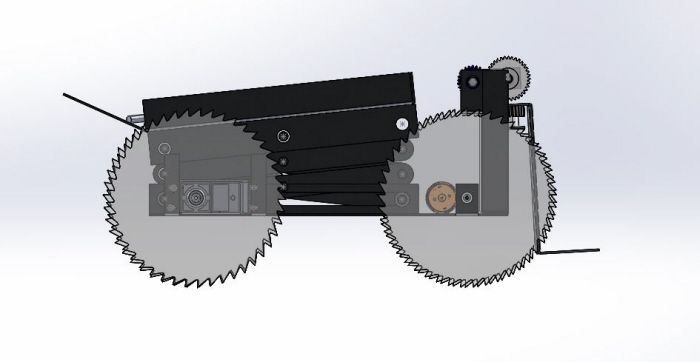
Robot had 3 stages: This is the first stage, the driving stage
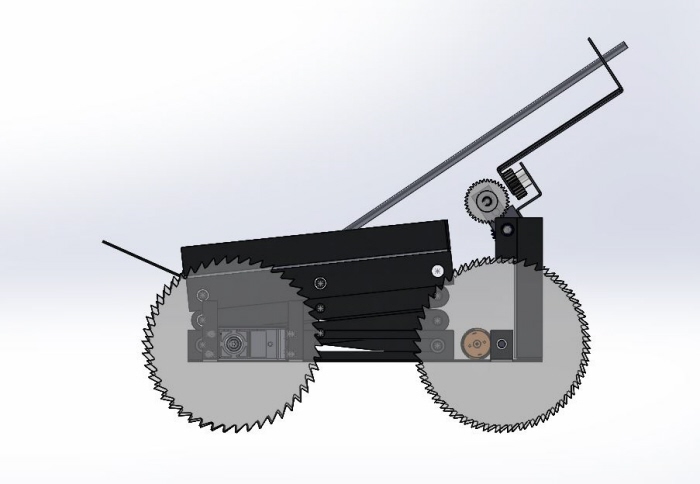
Second stage: Grabbing and storing stage
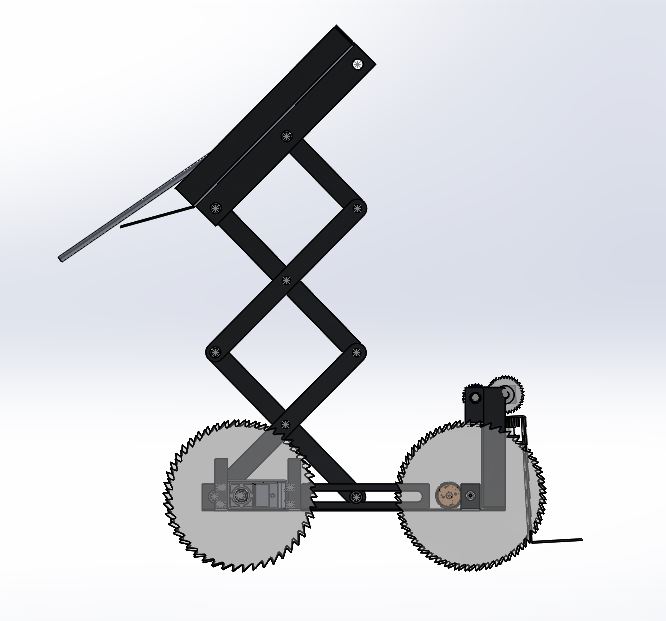
3rd and final Stage: dumping stage
gLike
2.007 Robot Competition
2.007, Design and Manufacturing I, is a project based class at MIT, which centers around a competition with a different theme every year. This year's them was skiing. Students score points by traversing up and down slopes, collecting medals, collecting flags, and dumping flags into the ski chalet at the bottom of the mountain. I decided to tackle what I though the most challenging task was, grabbing flags, storing them, and depositing them in the chalet.