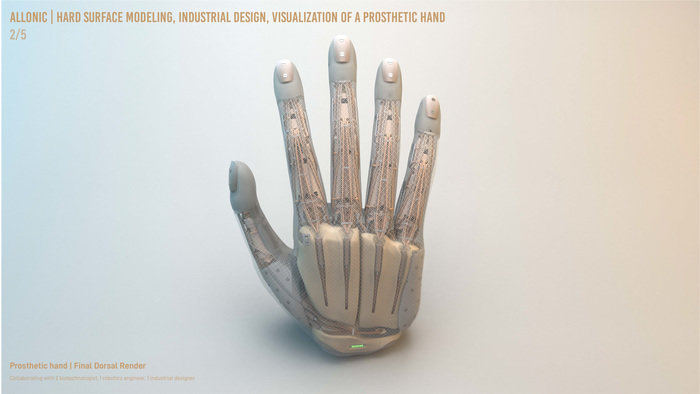

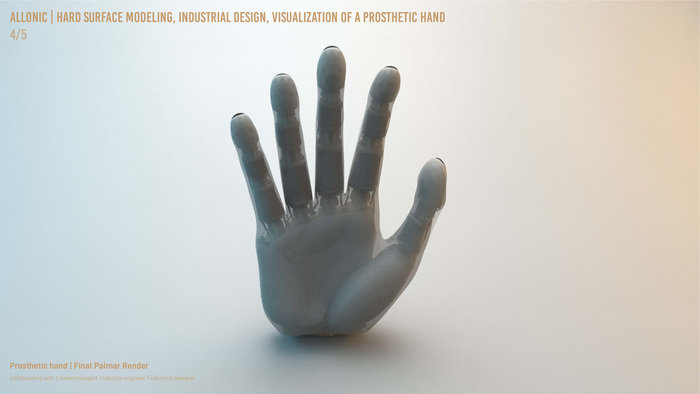
I had the privilege of collaborating with two biotechnologists, a robotics engineer, and an industrial designer on the development of a functional prosthetic hand. Our team, at Allonic Robotics, had a distinct goal: to design a fully functional robotic hand that closely mimics the intricate anatomy of the human hand. We aimed to achieve this by minimizing the number of gears and assembly parts while utilizing dyneema tendons, which replicate the tendon structure found in the human hand. Our objective was to restore the complete range of motion and strength of a hand to anyone in need of this device.
Within this project, my role was to create a comprehensive visualization of the second prototype. I was responsible for designing an aesthetically pleasing housing, visualizing the full tendon structure and creating pads that would complement the existing skeletal structure provided by the team.