


This project is a part of my mechanical engineering class: mechanical design with microprocessors. We work in team to design build and program an autonomous wheelchair.
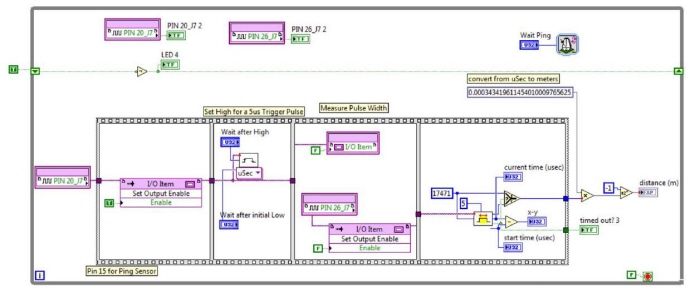
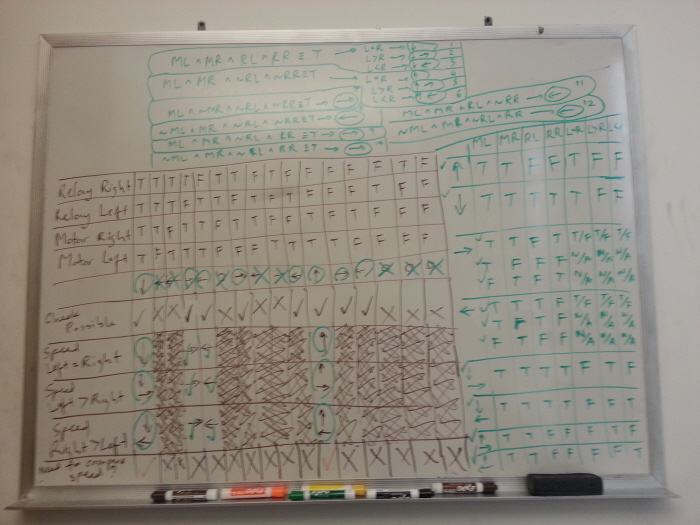
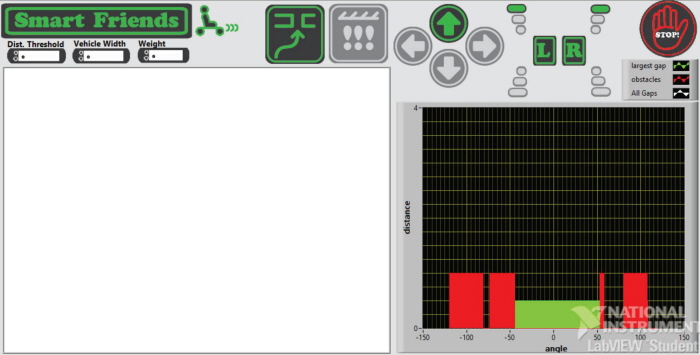
The wheel chair system incorporate the a Kinect camera, a Ping ultrasonic sensor, two scooter motors, two relays, on the Labview platform. This complex system can be divided into four parts: mechanical, electrical, back end, and front end Labview programming. The mechanical design includes the user ergonomics, caster wheels study, and electrical harness considerations. The electrical design focuses on the power delivery, switches for controls, safety considerations, and microprocessor interface. The back end programming includes the object avoidance algorithms, and hardware - RIO board communications. The front end provides user interface that communicate the wheelchair status to the users, and provide the inputs to the wheelchair calibrations.