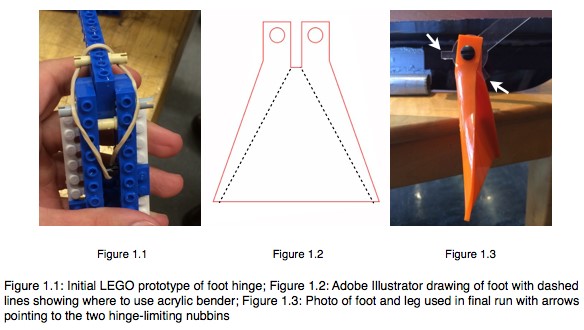
Description in picture
Description in picture
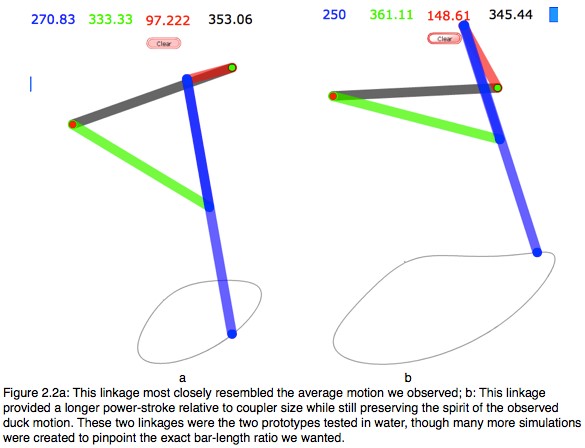
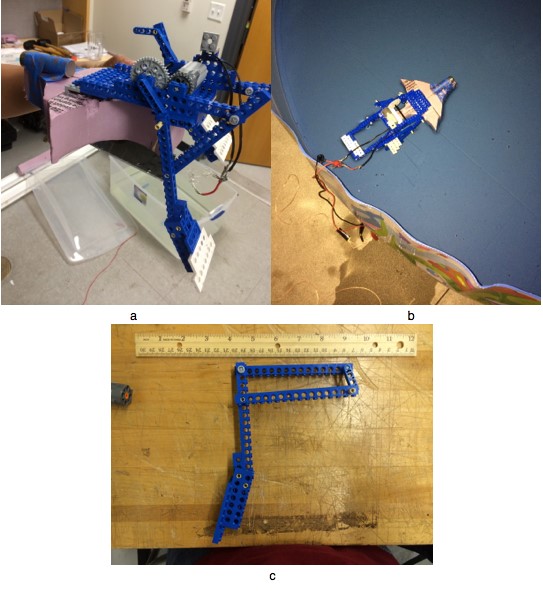
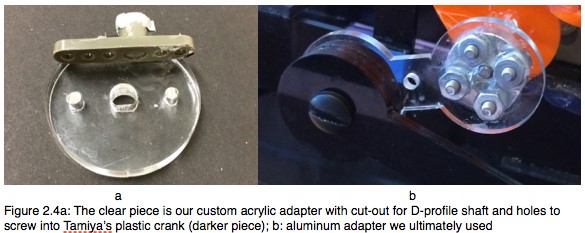
Figure 2.3a: One prototype linkage on a makeshift LEGO and foam duck prototype; b: the same linkage being tested in the water; c: linkage with foot attached to rocker arm
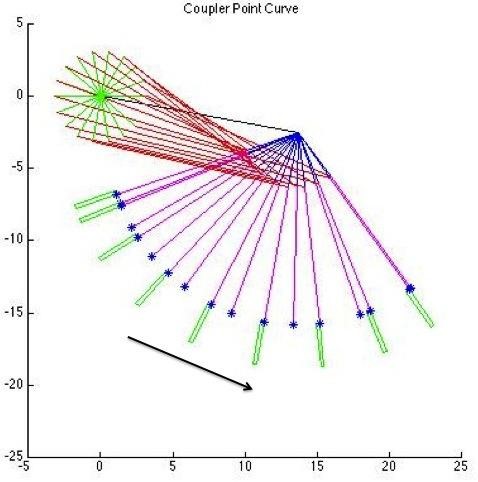
Matlab analysis of four-bar linkage coupler curve, of duck's RECOVERY stroke while paddling
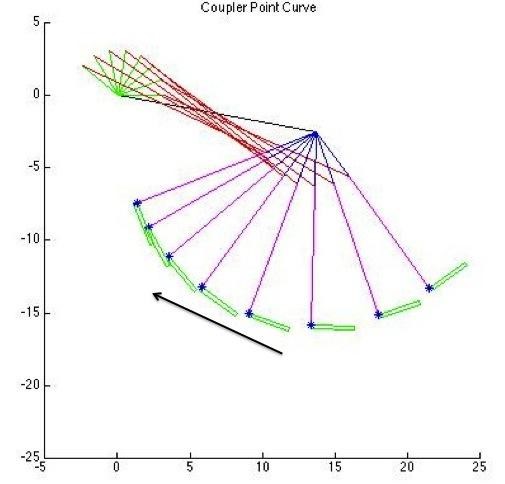
Matlab analysis of four-bar linkage coupler curve, of duck's POWER stroke while paddling

Final four-bar linkage design, fused to decoy body
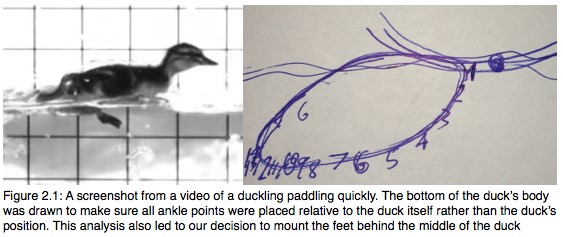
Description in picture

Third iteration of duck, adopting a trimaran, triple keel design for stability during paddling
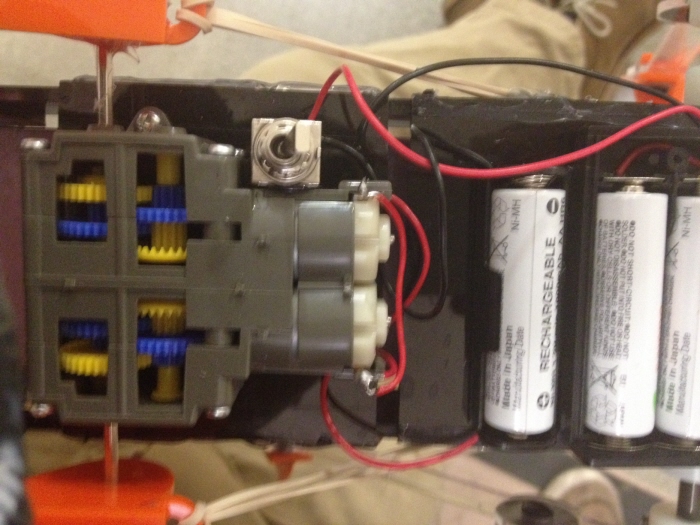
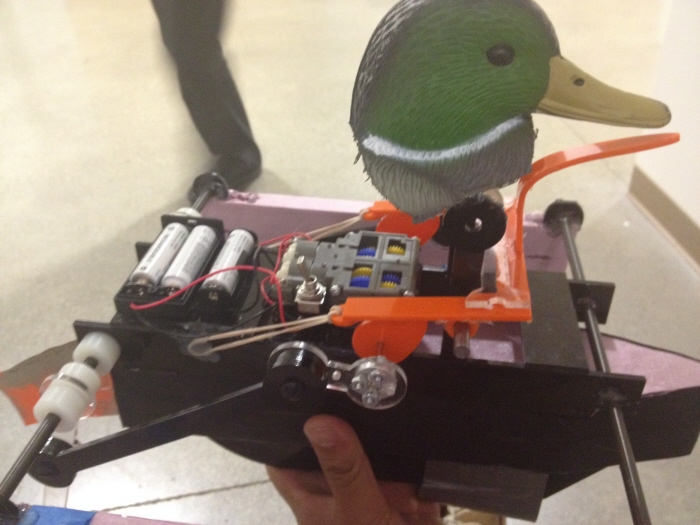
Top view of Tamiya motor, transmission, switch, and power source
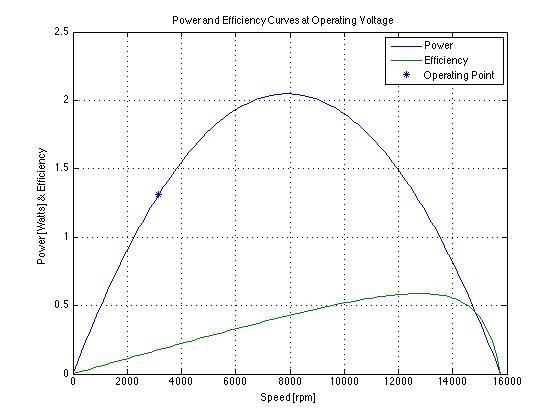
Matlab created estimate of Tamiya motor's power output and efficiency, given our operating requirements. Adequately mimics the power (metabolic) consumption of an actual duck.
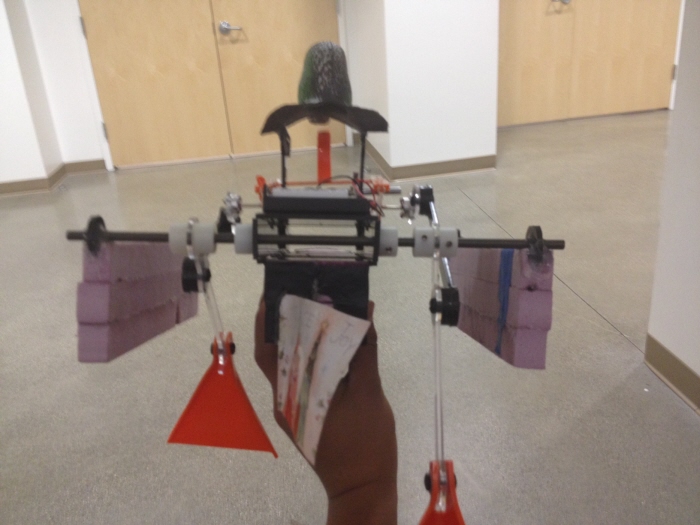
Back view, displaying trim rudder

gLike
Animatronic Duck
A team-based, mechanical systems project for Stanford's ME 112 class, that required the construction of an biomimetic, swimming duck that modeled the paddling motion, speed, and metabolic cost of an actual duck. All materials were sourced, requiring modification and assembly processes such as laser cutting, general machine shop tools (band saw, drill press, etc.), manual milling, and difficult tolerances in our assembly of a complicated electro-mechanical system.
My most major contributions on the team were with the hull design iteration, motor/transmission selection, machining of sourced materials, and assembly of our device.