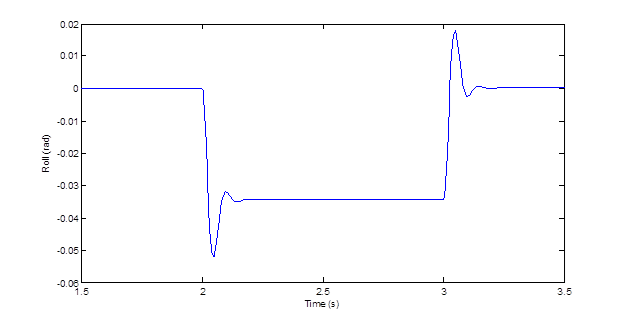
Figure 19: Sprung Mass Roll
gLike
Vehicle Suspension Model
With a team of 2 mechanical engineers, we developed an analytical simulation of a 7-DOF vehicle suspension system evaluating the bounce (body and individual tire), pitch, and roll of the vehicle in response to elevation changes in the road surface. My contribution to this project was researching the mathematical relations of each degree of freedom and implementing the equations into an iterative solution finder (Simulink).






























