










Autonomous tracking robot
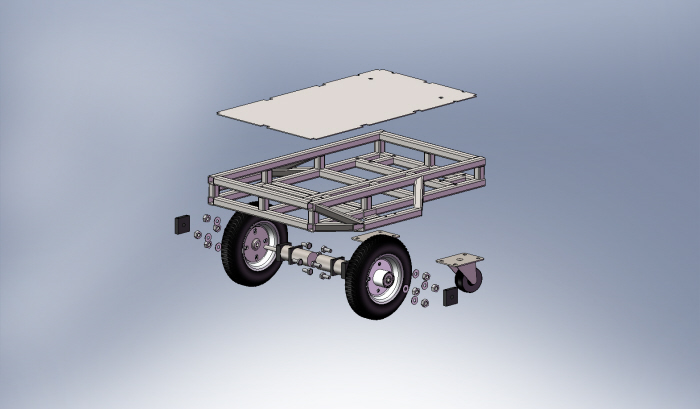
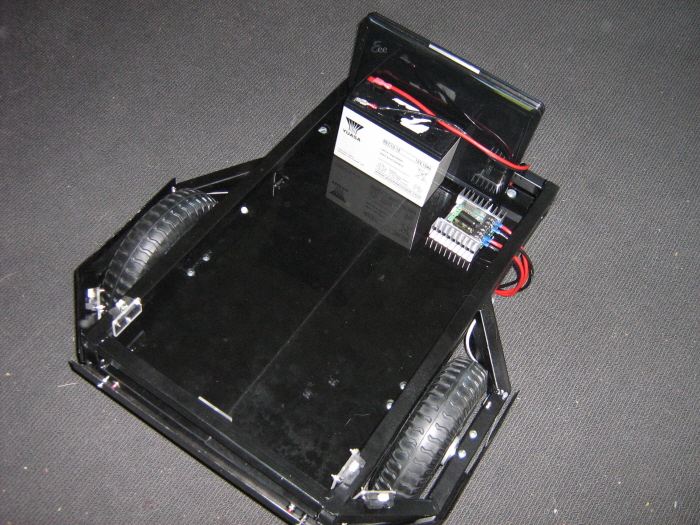
As our Final year project, we created an Autonomous tracking vehicle. It used vision recognition to identify its target, was designed to carry a payload up to 15k, move at a brisk walking pace and operate for at least two hours.
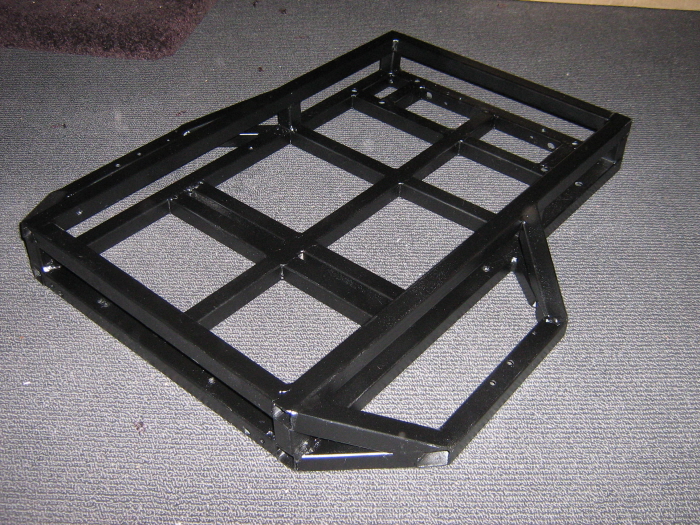
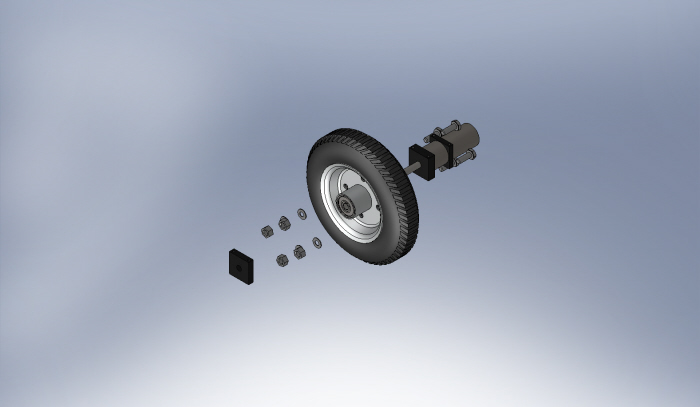
My main involvement was the design/refinement of the mechanical, electrical and electronic systems. I also manufactured the electrical and electronic systems.
The challenging aspect of this project was the combination of custom and off-the-shelf components, to meet the design brief.